|
Мощные полевые транзисторы в современном электроприводе.
(Окончание. Начало в № 6’2001)
Краткий обзор мощных полевых транзисторов фирмы Philips Semiconductors
При предварительном выборе типа приборов для разработчика наиболее важны следующие параметры:
- V(BR)DSS — минимальное напряжение пробоя;
- ID — ток стока длительный;
- IDM — ток стока импульсный;
- RDS(ON) — сопротивление открытого (выключенного) канала;
- WDSS — допустимая энергия одиночного импульса;
- VGS(th) — пороговое (неотпирающее) напряжение затвор-исток;
- VGS — отпирающее напряжение затвор-исток.
Остальные характеризующие и предельно-допустимые параметры, знание которых необходимо для проектирования и расчета электрических и тепловых режимов, можно найти на Web-сайте http://semiconductors.philips.com.
Схемотехника силовой части преобразователей энергии
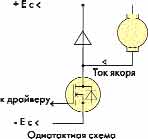
Выбор схемы силовой части преобразователя энергии определяется типом двигателя и требованиями к системе электропривода. Самая простая однотактная схема импульсного регулятора (рис. 6) обеспечивает возможность регулирования напряжения якоря двигателя постоянного тока для стабилизации частоты вращения и ограничения тока в нереверсивном электроприводе при низких требованиях к быстродействию. В такой схеме ток якоря не может изменить направление, поэтому торможение обеспечивается только выбегом. Дроссель для уменьшения пульсаций тока якоря обычно не требуется. Хорошие динамические свойства полевого транзистора позволяют реализовать такую частоту переключения, при которой собственная индуктивность якоря двигателя достаточна для сглаживания пульсаций тока.

При выключенном транзисторе (в паузе) ток якоря замыкается через блокирующий диод. При включении транзистора на этапе рассасывания диода необходимо ограничивать скорость нарастания тока. Для этого можно использовать, например, простую LRD-цепь (рис. 7). Величина индуктивности определяется напряжением питания Ес и допустимой скоростью нарастания тока dI/dt по выражению Lі Ес /(dI/ dt). Резистор и диод обеспечивают ограничение напряжения при выключении транзистора и рассеяние энергии, накапливаемой в индуктивности за время выключения блокирующего диода. В низковольтных устройствах для исключения цепи ограничения в качестве блокирующего лучше использовать диод Шоттки.
Таблица 6. Транзисторы на 75...100 В для автомобильной электроники.
| Тип |
Корпус |
VGS B |
Технология |
VDSMAX, B
(25 °C) |
IDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °С) |
| BUK7528-100A |
SOT78 |
10 |
N-channel |
100 |
47 |
0,028 |
| BUK9628-100A |
SOT404 |
5 |
N-channel |
100 |
47 |
0,028 |
| BUK95180-100A |
SOT78 |
5 |
N-channel |
100 |
11 |
0,180 |
Таблица 7. Транзисторы на 30...55 В для автомобильной электроники.
| Тип |
Корпус |
VGS B |
Технология |
VDSMAX, B
(25 °C) |
IDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °С) |
| BUK7508-55A |
SOT78 |
10 |
N-channel |
55 |
75 |
0,008 |
| BUK9506-55A |
SOT78 |
5 |
N-channel |
55 |
75 |
0,0063 |
| BUK9520-55 |
SOT78 |
5 |
N-channel |
55 |
52 |
0,02 |
| BUK9675-55 |
SOT404 |
5 |
N-channel |
55 |
19,7 |
0,075 |
Таблица 8. Силовые ключи со встроенной логикой и защитой для автомобильной электроники.
| Тип |
Корпус |
VDSMAX, B (25 °C) |
VIS, B |
VDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °C) |
Число выводов |
| BUK223-50Y |
SOT78 |
50 |
5 |
12 |
0,03 |
5 |
| BUK100-50DL |
SOT78 |
50 |
5 |
15 |
0,125 |
3 |
| BUK127-50DL |
SOT223 |
50 |
5 |
7 |
0,2 |
3 |
Нереверсивное управление двигателем при высоких требованиях к быстродействию электропривода обеспечивает полумостовая схема (рис. 8).
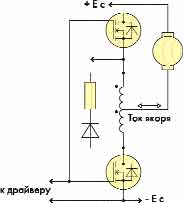
Рис. 8
Схему, в которой два силовых ключа соединены последовательно по отношению к источнику питания, называют «стойка». В такой схеме ток якоря в импульсе и паузе замыкается через транзисторы, что обеспечивает возможность создания тока в обоих направлениях. Роль блокирующих выполняют встроенные диоды. Ограничение скорости нарастания тока в процессе выключения диодов может выполняться так же, как и в предыдущей схеме. На рисунке показан другой возможный вариант включения LRD-цепи. При таком включении нет «просадки» напряжения на питающих шинах. Это может быть полезно, если от данных шин питаются и другие потребители. Верхний и нижний транзисторы стойки переключаются сигналами от драйверов противофазно. Из-за конечной скорости процессов включения и выключения транзисторов могут появляться короткие интервалы времени, когда оба транзистора открыты и через них протекает «сквозной» ток, величина которого в определенной мере ограничивается индуктивностью. Для уменьшения массы и габаритов дросселя обычно вводится задержка включения одного транзистора на время выключения другого.
При рекуперативном торможении двигателя накопленная кинетическая энергия преобразуется в электрическую, которая передается через шины питания другим потребителям и в источник. Это может привести к повышению напряжения питания. В такой ситуации для ограничения напряжения в схему вводят балластный (тормозной) резистор, подключаемый через силовой ключ при торможении, как показано штрихами на рис. 9.
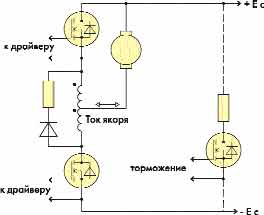
Рис. 9
Драйвер верхнего транзистора стойки должен быть гальванически изолирован от остальных цепей. Зачастую подключить общую точку цепи управления непосредственно к истоку нижнего ключа невозможно. Из-за большой скорости изменения тока и паразитной индуктивности шины питания между общими точками силовой цепи и цепи управления возникает большая разность потенциалов. Для устранения влияния этой помехи необходима гальваническая развязка и для драйвера нижнего ключа.
В низковольтных маломощных системах, когда напряжение питания меньше предельно допустимого напряжения затвора, можно существенно упростить драйвер стойки, если использовать комплиментарную пару из
p-канального и n-канального транзисторов (показано на рисунке справа). Такие пары выпускаются и в одном корпусе — например, PHC21025.
Полумостовые схемы с разделительными конденсаторами, подобные рассмотренным выше, используются в инверторах малой и средней мощности.
В реверсивных электроприводах необходимо изменять не только направление тока, но и полярность напряжения нагрузки. Те же свойства должен иметь и источник энергии для двигателей переменного тока. Это обеспечивают мостовые схемы, показанные ниже.
В таких схемах используются цепи ограничения скорости нарастания тока и ограничения напряжения, аналогичные рассмотренным ранее (на рисунке не показаны).
Для построения быстродействующего реверсивного электропривода постоянного тока используют мостовую однофазную схему импульсного регулятора (рис. 10), состоящую из двух стоек.
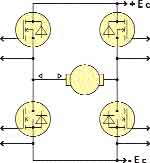
Рис. 10
При соответствующем управлении ключами схема позволяет изменять направление тока и полярность напряжения якоря двигателя. Такая же схема используется и для построения мощных однофазных регулируемых инверторов напряжения и тока.
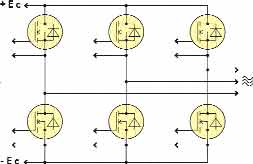
Рис. 11
Трехфазная мостовая схема, состоящая из трех стоек (рис. 11), используется в системах регулируемого электропривода переменного тока на базе синхронных и асинхронных двигателей с частотным управлением, а также для построения коммутаторов бесконтактных двигателей постоянного тока. В зависимости от способа управления ключами выходное трехфазное напряжение такой схемы может иметь как прямоугольную форму, так и квазигармоническую (при использовании широтно-импульсной модуляции фазных напряжений). Для электроприводов малой мощности трехфазные мостовые схемы изготавливают и в виде модулей. Например, PHN603S представляет собой мост со встроенными блокирующими диодами Шоттки в 24-выводном корпусе.
Для шаговых двигателей обычно требуется создание однополярных токов в фазных обмотках (фазах) и переключение этих токов в определенной последовательности (коммутация). В целях осуществления коммутации достаточно использовать простую однотактную схему для каждой фазы. Характерной особенностью большинства шаговых двигателей является относительно большая величина индуктивности фазы. Для полного использования возможностей двигателя требуется форсировать нарастание и спад фазных токов. Самое простое решение — увеличение напряжения питания и включение последовательно с фазной
обмоткой балластного резистора. Это уменьшает электромагнитную постоянную времени фазной обмотки при сохранении величины тока. Однако в данном случае для силовых шаговых двигателей в несколько раз возрастает потребляемая мощность, и необходима большая площадь теплоотводящего радиатора. Существенно уменьшить габариты и массу коммутатора позволяет модифицированная однотактная схема, в которой коммутируются оба вывода фазной обмотки (рис. 12).
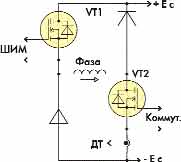
Рис. 12
VT2 коммутирует фазу по сигналам от контроллера, датчик тока ДТ выдает информацию о величине фазного тока, и контроллер вырабатывает сигнал ШИМ, переключающий VT1 для поддержания тока требуемой величины. Диоды обеспечивают ограничение ЭДС самоиндукции фазы при запертых транзисторах. Схема существенно сложнее однотактной, но обеспечивает возможность форсирования при малых дополнительных потерях. Регулирование фазного тока делает привод малочувствительным к колебаниям напряжения питания и позволяет реализовать электрическое дробление шага двигателя.
Выбор типа транзисторов
Основными факторами, определяющими выбор типа транзистора, являются надежность системы, возможность реализации предполагаемых алгоритмов управления электроприводом, коэффициент полезного действия преобразователя энергии, затраты.
Для обеспечения надежности необходимо, чтобы при функционировании системы при всех возможных нагрузках и воздействиях не превышались предельно допустимые электрические режимы транзистора и температура кристалла. На самом деле, пока не выбран тип транзистора, неизвестны и точные значения электрических нагрузок. Если же назначить чрезмерно большой запас, компенсируя незнание, это приведет к неоправданно большим затратам. Дело в том, что стоимость силовых транзисторов составляет заметную долю стоимости всех компонентов и растет с ростом предельно допустимых значений напряжения и тока. Упомянутые трудности зачастую значительно смягчаются дискретностью ряда допустимых значений.
Наибольшее напряжение сток-исток транзистора практически равно напряжению источника питания. Для обеспечения надежности принято вводить запас по предельно допустимому напряжению. Изучение рекомендаций, руководств пользователя, параметров и гарантий на преобразователи энергии и вторичные источники питания различных фирм показывает, что отношение максимального напряжения к предельно допустимому находится в пределах 0,65…0,75. При таком коэффициенте запаса обеспечивается и возможность защиты шин питания от неповторяющихся всплесков напряжения варисторами. Зона разброса порогового напряжения варистора оказывается между значениями максимального и предельно допустимого напряжений.
Выбор транзистора по допустимому току стока должен обеспечить выполнение двух требований: максимальный ток нагрузки должен быть меньше допустимого тока стока, а температура перехода (кристалла) — меньше предельно допустимой. В системах электропривода ток нагрузки может существенно изменяться во времени. Требования должны выполняться в наиболее тяжелом режиме по току нагрузки, даже если такой режим кратковременен. Это обусловлено тем, что электромеханическая постоянная времени двигателя и механизма практически всегда значительно больше, чем тепловая постоянная времени транзистора. Обычно наибольшая величина тока нагрузки достаточно точно ограничивается регулятором тока системы электропривода.
В конечном итоге выбор типа транзистора основан на выборе наибольшей температуры перехода. От этой температуры зависит интенсивность отказов, которая быстро возрастает при приближении значения температуры к предельно допустимому. С другой стороны, запас по температуре увеличивает стоимость транзистора (из-за большего предельно допустимого тока) и требует теплоотвода больших размеров. При предельно допустимой температуре перехода +175 °С (типовое значение для современных приборов) рекомендуемая максимальная температура составляет +100…150 °С. Для расчета теплового режима необходимо знать параметры транзистора и теплоотвода. Поэтому на данном этапе приходится рассчитывать несколько вариантов и выбирать наиболее рациональный. Заметим, что при определении параметров теплоотвода в зависимости от конструктивных требований возможны два подхода: расчет размеров и формы теплоотвода при заданном тепловом сопротивлении или расчет теплового сопротивления при заданных массогабаритных ограничениях.
В зависимости от свойств электропривода и источника питания при наибольшем токе нагрузки напряжение нагрузки может быть близким к напряжению питания или заметно меньшим. В первом случае переключение силовых транзисторов происходит с коэффициентом заполнения, близким к единице. При этом для расчета используют статическое тепловое сопротивление переход-корпус. Во втором случае коэффициент заполнения существенно меньше единицы, и для расчета следует использовать переходное тепловое сопротивление. Семейство графиков переходного теплового сопротивления изготовитель приводит для всех типов мощных полевых транзисторов (см. пример выше для PSMN004-55W).
В обоих случаях действующее значение тока стока ID можно принять равным максимальному току нагрузки IHMAX и вычислять статическую мощность потерь в транзисторе по формуле PD = I2HMAX ґRDS. Сопротивление открытого транзистора зависит от температуры перехода. В формулу следует подставить значение сопротивления при выбранной максимальной температуре. Типовая зависимость сопротивления от температуры приводится изготовителем.
Мощность потерь, определяющая нагрев транзистора, равна сумме статической и динамической составляющих. Последнюю можно определить после выбора частоты и времени переключения транзисторов, однако обычно динамические потери для полевых транзисторов в 5…10 раз меньше статических, и их можно учесть, умножив расчетную мощность PD на 1,1…1,2.
После теплового расчета следует уточнить допустимый ток стока в соответствии с температурой корпуса транзистора (график приведен выше в примере) и сопоставить его с максимальным током нагрузки.
Для увеличения допустимого тока и уменьшения теплового сопротивления корпус — теплоотвод можно включить несколько транзисторов одного типа параллельно. Благодаря положительному температурному коэффициенту сопротивления сток — исток происходит частичное выравнивание токов через параллельно соединенные каналы, и дополнительные элементы для равномерного распределения нагрузки не используются. Значительный разброс сопротивлений при нормальной температуре все-таки не позволяет полностью выровнять токи. Для исключения перегрузки одного из транзисторов при проектировании вводят коэффициент запаса по току порядка 1,2…1,3.
Параллельное соединение мощных быстродействующих приборов (рис. 13) может приводить к возникновению паразитных высокочастотных колебаний. Для исключения этого, а также для уменьшения влияния разброса заряда переключения в цепи затворов рекомендуется использовать параллельное включение резисторов (см. рис. 13).
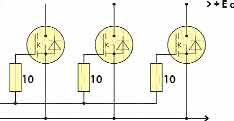
Рис. 13
Из-за многих неопределенностей при расчете выбранный тип транзистора обычно с запасом удовлетворяет исходным требованиям. За этот запас приходится платить, и более высокая надежность не всегда компенсирует затраты. Нередко система в целом допускает кратковременные отключения преобразователя энергии. В этом случае можно устранить излишний запас, сохраняя уровень надежности. Для этого используют непосредственный контроль температуры перехода и отключение преобразователя энергии при приближении к опасной температуре. Philips Semiconductors выпускает ряд типов приборов со встроенной логикой контроля температуры кристалла, состояния нагрузки и отключения при ее перегреве или коротком замыкании. Состояние встроенной логики доступно для внешних устройств как логический сигнал «флаг» (см. BUK106-50L).
Выбор алгоритма и частоты переключения
Алгоритм переключения характеризует последовательность включения-выключения транзисторов и величину управляющих сигналов, от которой зависит скорость переключения. Для наиболее распространенных мостовых схем следует оценивать два уровня алгоритма: управление транзисторами стойки и управление стойками. При этом мы исходим из того, что от алгоритма управления зависят затраты на ограничение сквозного тока, сложность управляющего устройства, амплитуда и частота пульсаций напряжения нагрузки. По этим признакам можно предварительно выбрать алгоритм, не рассматривая на этом этапе конкретные решения по устройству управления.
Для стойки возможны три способа управления:
переключение одного транзистора при запертом другом;
противофазное переключение обоих транзисторов одновременно;
противофазное управление с задержкой включения.
В первом случае ток нагрузки в паузе замыкается через блокирующий диод. Прямое падение напряжения на нем обычно заметно больше, чем на открытом полевом транзисторе. Поэтому второй способ управления дает меньшие статические потери энергии. Однако при этом возрастают динамические потери и требуется цепь ограничения сквозного тока. Третий способ дает минимум затрат на ограничение сквозного тока, но усложняет требования к устройству управления.
Для однофазной мостовой схемы (независимо от способа управления «внутри» стойки) наиболее распространены следующие способы управления:
противофазное переключение стоек;
переключение одной стойки при фиксированном состоянии другой;
симметричное переключение стоек (при нулевом выходном напряжении обе стойки переключаются синфазно с коэффициентом заполнения, равным 0,5; для
изменения выходного напряжения коэффициент заполнения одной стойки увеличивается, а другой уменьшается, причем временные диаграммы сигналов управления стойками симметричны относительно друг друга).
Первый способ приводит к наименьшим затратам на устройство управления, последний — к наибольшим, поскольку (в зависимости от способа переключения внутри стойки) требует до четырех независимых каналов ШИМ.
Наибольшая амплитуда пульсаций выходного напряжения в первом случае равна напряжению питания, во втором и третьем — половине напряжения питания. Частота пульсаций в первом и втором случаях равна частоте переключения стойки, в третьем — в два раза больше.
Амплитуда управляющих сигналов влияет на величину динамических потерь в ключах. Чем она больше, тем быстрее заряжаются/разряжаются паразитные емкости транзисторов, тем меньше время переключения и динамические потери. Однако при этом растет уровень электромагнитных помех, генерируемых преобразователем, и частотный спектр этих помех расширяется в область высоких частот. Увеличение амплитуды приводит и к росту затрат на управляющее устройство. В конечном итоге амплитуду выбирают после определения частоты переключения и способа управления как компромисс между потерями энергии, помехами и затратами.
Частота и амплитуда пульсаций определяют величину переменной составляющей тока нагрузки и, следовательно, дополнительные потери в меди двигателя. С ростом частоты эти потери уменьшаются, но увеличиваются динамические потери в силовых ключах. Выбор значения частоты диктуется стремлением минимизировать суммарные потери. Кроме того, частота влияет на уровень электромагнитного излучения и акустических шумов. Однако эти факторы чрезвычайно сложно рассчитать, поэтому их учитывают уже по результатам натурных испытаний.
Таким образом, алгоритм и частота переключений определяются с учетом всех названных факторов и требований к электроприводу в целом. В современных системах электропривода, использующих импульсные регуляторы и инверторы на мощных полевых транзисторах, при не слишком малой электромагнитной постоянной времени двигателя частота переключения составляет 4…16 кГц, а время переключения — 0,2…1 мкс. Для электроприводов с высокомоментными быстродействующими двигателями с малой электромагнитной постоянной времени (менее 1 мс) частота пульсаций обычно составляет 20…50 кГц, что легко достижимо при симметричном управлении, когда частота переключения стоек вдвое меньше.
Аркадий Кроз
philips@aogamma.spb.su
Таблица 9. Трнзисторы на напряжение 100 В...300 В
| Тип |
Корпус |
VGS B |
Технология |
VDSMAX, B
(25 °C) |
IDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °С) |
| BS108 |
SOT54 |
28 |
VDMOS |
200 |
0,25 |
8 |
| BSN254 |
SOT54 |
10 |
N-channel |
250 |
0,3 |
7 |
| BSN254A |
SOT54 |
10 |
N-channel |
250 |
0,3 |
7 |
| IRF540 |
SOT78 |
10 |
N-channel |
100 |
28 |
0,077 |
| PHB23NQ10T |
SOT404 |
10 |
N-channel |
100 |
23 |
0,07 |
| PHP9NQ20T |
SOT78 |
10 |
N-channel |
200 |
9 |
0,4 |
| PSMN070-200P |
SOT78 |
10 |
N-channel |
200 |
35 |
0,07 |
| PSMN130-200D |
SOT428 |
10 |
N-channel |
200 |
20 |
0,13 |
Таблица 10. Многокристальные приборы.
| Тип |
Корпус |
VGS B |
Технология |
VDSMAX, B
(25 °C) |
IDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °С) |
| PHC21025 |
SOT96 |
10 |
N-/P-channel |
30 |
3,5 (N)/2,3 (P) |
0 1 (N)/025 (P) |
| PHN203 |
SOT96 |
10 |
N-channel |
30 |
5,2 |
2x0,03 (N) |
| PHN603S |
SOT137 |
10 |
N-channel + Shottky |
25 |
8,3 |
6 x 0,035 (MOS), 6 x 5A Shottky |
| PHN70308 |
SOT341 |
10 |
N-channel |
25 |
5 |
1 x 0, 03/6 x 0,08 (N) |
| PHP212 |
SOT96 |
10 |
VDMOS |
30 |
4 |
2 x 0,12 (P) |
Таблица 11. Транзисторы общего назначения.
| Тип |
Корпус |
VGS B |
Технология |
VDSMAX, B
(25 °C) |
IDMAX, A
(25 °C) |
RDS(ON), Ом
(25 °С) |
| 2N7000 |
SOT54 |
10 |
N-channel |
60 |
0,28 |
5 |
| BSH106 |
SOT363 |
25 |
N-channel |
20 |
1,43 |
0,25 |
| BSN20 |
SOT23 |
10 |
N-channel |
50 |
0,1 |
15 |
| BSN254A |
SOT54 |
10 |
N-channel |
250 |
0,3 |
7 |
| BSN304 |
SOT54 |
10 |
N-channel |
300 |
0,25 |
8 |
| BST82 |
SOT23 |
5 |
N-channel |
80 |
0,175 |
10 |
| IRF540S |
SOT78 |
10 |
N-channel |
100 |
28 |
0,077 |
| PHB37N06LT |
SOT404 |
10 |
N-channel |
55 |
37 |
0,032 |
| PHB42N03LT |
SOT404 |
10 |
N-channel |
30 |
42 |
0,023 |
| IPHD34NQ10T |
SOT428 |
10 |
N-channel |
100 |
34 |
0,04 |
| PSMN009-100W |
SOT429 |
10 |
N-channel |
100 |
100 |
0,009 |
| PSMN040-200W |
SOT429 |
10 |
N-channel |
200 |
50 |
0,04 |
| BUK455-60H |
TO220 |
10 |
N-channel |
60 |
43 |
0,034 |
| PHW11N40 |
SOT429 |
10 |
N-channel |
400 |
11 |
0,55 |
| BUK456-1000B |
TO220 |
10 |
N-channel |
1000 |
3,1 |
5 |
|